
управление манипулятором промышленного робота
Эта статья предоставит исчерпывающее руководство по управлению манипулятором промышленного робота, охватывая ключевые аспекты программирования, настройки и эксплуатации. Вы узнаете о различных методах управления, типах манипуляторов и критических моментах, которые необходимо учитывать для эффективной и безопасной работы.
Типы управления манипуляторами промышленных роботов
Прямое управление
Прямое управление предполагает непосредственное задание траектории движения манипулятора. Оператор или программа задают желаемые координаты, и робот следует им. Этот метод прост в реализации, но может быть менее эффективен для сложных задач.
Обратное управление
Обратное управление более сложное, но позволяет роботу адаптироваться к изменениям окружающей среды. Робот вычисляет необходимые движения на основе обратной связи от датчиков, обеспечивая точность и стабильность.
Комбинированное управление
Комбинированное управление объединяет преимущества прямого и обратного управления. Оператор может задавать общие параметры движения, а робот автоматически корректирует траекторию, используя обратную связь от датчиков. Этот метод наиболее распространен в современной робототехнике.
Программирование управления манипулятором
Программирование управления манипулятором промышленного робота осуществляется с помощью специализированного программного обеспечения (ПО). Существуют различные языки программирования роботов, такие как RAPID (ABB), KRL (KUKA) и другие. ПО обычно включает в себя функции для задания траектории, управления скоростью, силы и точностью движений.
Выбор манипулятора
Выбор подходящего манипулятора зависит от конкретного применения. Некоторые ключевые факторы включают в себя грузоподъемность, количество степеней свободы, рабочую зону и точность позиционирования. На рынке представлены манипуляторы различных производителей, каждый со своими особенностями и характеристиками.
Безопасность работы с промышленными роботами
Безопасность – первостепенная задача при работе с промышленными роботами. Необходимо соблюдать все инструкции производителя, использовать средства индивидуальной защиты и следить за исправностью оборудования. Важно также правильно настроить системы безопасности робота, такие как датчики столкновений и аварийные остановки.
Примеры применения
Управление манипулятором промышленного робота используется во многих отраслях промышленности, включая автомобилестроение, электронику, пищевую промышленность и др. Примеры включают в себя сварку, покраску, сборку, паллетизацию и обработку материалов.
Таблица сравнения типов управления
| Тип управления | Преимущества | Недостатки |
|---|---|---|
| Прямое | Простота реализации | Низкая адаптивность |
| Обратное | Высокая точность и адаптивность | Сложность реализации |
| Комбинированное | Объединяет преимущества прямого и обратного управления | Более сложная настройка |
Для получения более подробной информации о управлении манипулятором промышленного робота и решениях в области автоматизации производства, вы можете обратиться к специалистам компании ООО Синьцзян Хайфэн Электроэнергетическая Технология, которая специализируется на энергетических технологиях и имеет опыт в интеграции робототехнических систем.
1 Информация взята из открытых источников и руководств производителей робототехники.
Соответствующая продукция
Соответствующая продукция






Самые продаваемые продукты
Самые продаваемые продукты-
 СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ
СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ -
 ОДНООСНЫЕ РОБОТЫ
ОДНООСНЫЕ РОБОТЫ -
 УДАЛЕННЫЙ ДОСТУП EWON COSY
УДАЛЕННЫЙ ДОСТУП EWON COSY -
 АВТОМАТИЧЕСКИЕ ВЫКЛЮЧАТЕЛИ И РУБИЛЬНИКИ В ЛИТЫХ КОРПУСАХ
АВТОМАТИЧЕСКИЕ ВЫКЛЮЧАТЕЛИ И РУБИЛЬНИКИ В ЛИТЫХ КОРПУСАХ -
 РЕШЕНИЯ ДЛЯ ИДЕНТИФИКАЦИИ
РЕШЕНИЯ ДЛЯ ИДЕНТИФИКАЦИИ -
 Электронные реле перегрузки SIRIUS 3RB2
Электронные реле перегрузки SIRIUS 3RB2 -
 S7-1500: Непревзойденный плюс в плане производительности и экономичности
S7-1500: Непревзойденный плюс в плане производительности и экономичности -
 ДАТЧИКИ, ПЕРЕКЛЮЧАТЕЛИ И ЗАМКИ БЕЗОПАСНОСТИ
ДАТЧИКИ, ПЕРЕКЛЮЧАТЕЛИ И ЗАМКИ БЕЗОПАСНОСТИ -
 Индуктивный датчик
Индуктивный датчик -
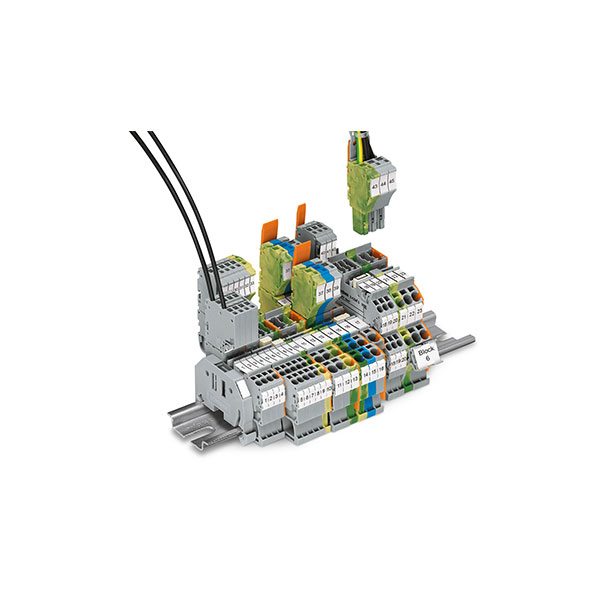 ПОДКЛЮЧАЕМЫЕ КЛЕММНЫЕ КОЛОДКИ ДЛЯ МОНТАЖА НА РЕЛЬСАХ
ПОДКЛЮЧАЕМЫЕ КЛЕММНЫЕ КОЛОДКИ ДЛЯ МОНТАЖА НА РЕЛЬСАХ -
 Технология экструзии серии 50 мм
Технология экструзии серии 50 мм -
 БАЗОВЫЙ КОНТРОЛЛЕР S7-1200
БАЗОВЫЙ КОНТРОЛЛЕР S7-1200
Связанный поиск
Связанный поиск- Китай ПРИВОДЫ
- Высококачественные поставщики источников питания SITOP Siemens
- Китай промышленная автоматизация
- Известный поставщик промышленных роботизированных рук как разновидности роботов
- внутренний замок
- Производитель лучших промышленных роботов- манипуляторов
- высокое ксчество Абсолютные датчики
- Китай Предохранительные запирающие устройства
- Датчики и поворотные энкодеры
- известный промышленная автоматизация